Tiếng Việt
 |













| MODEL: | |
|---|---|
| Số: | |
XHY
DLL
THÔNG SỐ KỸ THUẬT
DELI
ZHECÔNG TY TNHH KẾT NỐI JIANG DELI
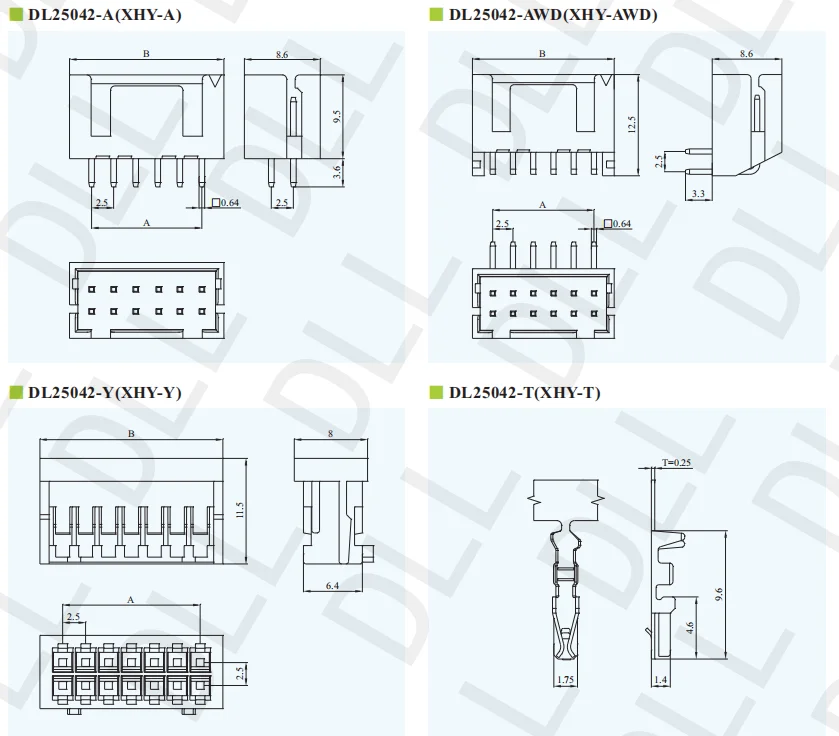
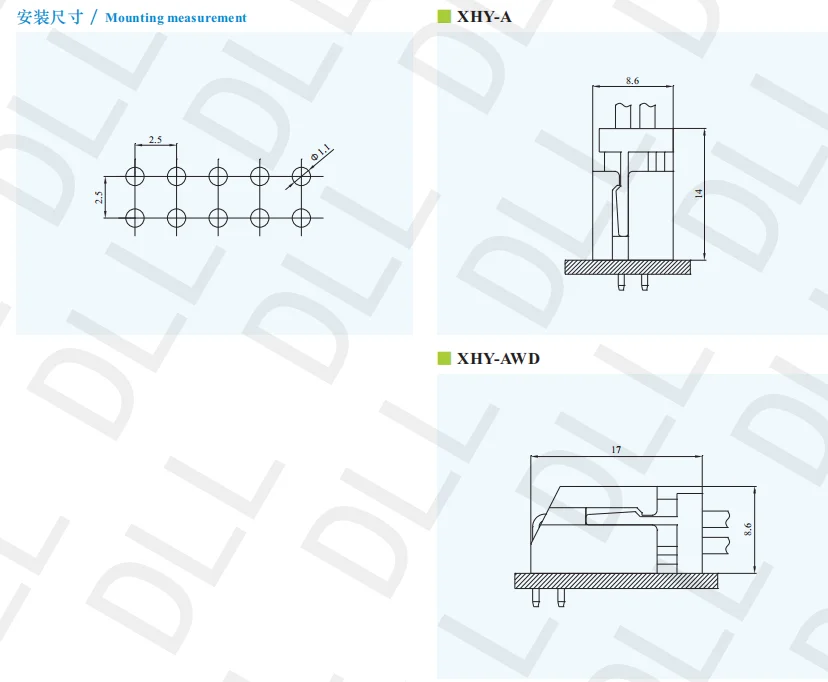
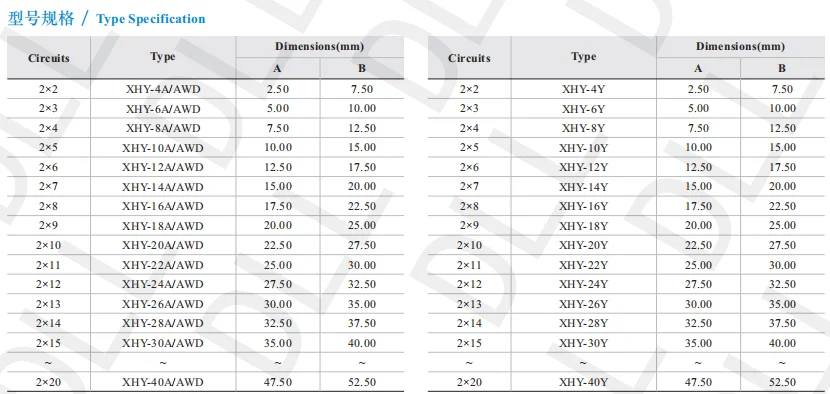
thay thế đầu nối tiêu đề pin xhy 2,5mm; đầu nối tiêu đề pin xhy 2,5mm
Điện áp định mức: | Điện áp xoay chiều 250V, một chiều |
Dòng điện định mức: | 3A AC, DC |
Điện trở tiếp xúc: | tối đa 30MΩ |
Điện trở cách điện: | 1000MΩ phút |
Chịu được điện áp: | 650V AC/phút |
Nhiệt độ: | -25℃~+85℃ |
VẬT LIỆU
DELI
ZHECÔNG TY TNHH KẾT NỐI JIANG DELI
Nhà ở: | (Nylon) UL94-V0(2) |
Phần cuối: | Đồng phốt pho, mạ thiếc |
Bánh xốp: | (Nylon) UL94-V0(2) |
Nhiều Sản Phẩm Cho Bạn Lựa Chọn:

Ứng dụng
Hệ thống điều khiển robot: Trong hệ thống truyền động khớp, thu tín hiệu cảm biến và điều khiển của robot, đầu nối kim thẳng XHY có thể được sử dụng để kết nối các bộ phận như động cơ, bộ mã hóa, cảm biến lực. Ví dụ, động cơ được kết nối với bộ điều khiển khớp của robot thông qua đầu nối chốt thẳng để đạt được khả năng điều khiển chuyển động chính xác của các khớp; Bộ mã hóa phản hồi thông tin vị trí và vận tốc của khớp đến hệ thống điều khiển thông qua đầu nối kim thẳng, đạt được điều khiển vòng kín.
THÔNG SỐ KỸ THUẬT
DELI
ZHECÔNG TY TNHH KẾT NỐI JIANG DELI
thay thế đầu nối tiêu đề pin xhy 2,5mm; đầu nối tiêu đề pin xhy 2,5mm
Điện áp định mức: | Điện áp xoay chiều 250V, một chiều |
Dòng điện định mức: | 3A AC, DC |
Điện trở tiếp xúc: | tối đa 30MΩ |
Điện trở cách điện: | 1000MΩ phút |
Chịu được điện áp: | 650V AC/phút |
Nhiệt độ: | -25℃~+85℃ |
VẬT LIỆU
DELI
ZHECÔNG TY TNHH KẾT NỐI JIANG DELI
Nhà ở: | (Nylon) UL94-V0(2) |
Phần cuối: | Đồng phốt pho, mạ thiếc |
Bánh xốp: | (Nylon) UL94-V0(2) |
Nhiều Sản Phẩm Cho Bạn Lựa Chọn:
Ứng dụng
Hệ thống điều khiển robot: Trong hệ thống truyền động khớp, thu tín hiệu cảm biến và điều khiển của robot, đầu nối kim thẳng XHY có thể được sử dụng để kết nối các bộ phận như động cơ, bộ mã hóa, cảm biến lực. Ví dụ, động cơ được kết nối với bộ điều khiển khớp của robot thông qua đầu nối chốt thẳng để đạt được khả năng điều khiển chuyển động chính xác của các khớp; Bộ mã hóa phản hồi thông tin vị trí và vận tốc của khớp đến hệ thống điều khiển thông qua đầu nối kim thẳng, đạt được điều khiển vòng kín.